Hi! I'm Namkha
I'm a Robotics Software Engineer currently working on the design and development of flight controls and autonomy software for the next generation of military aircraft at Lockheed Martin.
I specialize in Control System Engineering, Mathematical Modeling, Numerical Analysis, and Embedded Software for robotic systems.
My programming proficiencies are in C/C++, Python, and Matlab/Simulink, and work comfortably with Agile Software Development methodologies.
My work experience spans the medical device, mobile robotics and aerospace industries. I also provide career development services to college students and young professionals pursuing paths in these areas and the tech field in general.
Apart from my clear reverence for our future artificially intelligent overlords, I am also a passionate believer in the proliferation of STEM education, especially in under-developed areas such as the town of Darjeeling in the Himalayan foothills where I grew up. Here is a bi-lingual talk I gave to young high school students in my hometown about careers and opportunities in the age of technology. You can otherwise see me either training Brazilian Jiu-Jitsu or playing tabletop board games. I may like robots, but I'm not a robot, you guys!
Education and Work
Software Engineer - Flight Controls and Autonomous Systems
- Sabbatical Period -
Oct 2019 - Jul 2020
* Udacity Robotics Software Engineering Nanodegree
* Volunteer work
Robotic Control Systems Engineer
Deka Research and Development
May 2018 - Sep 2019
Graduate Teaching Assiatant
Machine Learning at Georgia Tech
Aug 2017 - Dec 2017
Master's Degree in Robotics and Controls
Georgia Institute of Technology (Atlanta, GA)
Aug 2016 - Dec 2017
Dynamic Systems Engineering Intern
Alpinax Drone Services
May 2016 - Dec 2016
Engineering Intern
CIRTEC Medical Systems
May 2015 - Dec 2015
Bachelor's Degree in Mechanical Engineering
University of Massachusetts (Amherst, MA)
Aug 2012 - May 2016
Professional Work
The following are some professional project/product teams I have been a part of:

U.S. Army FARA programme
- Lockheed Martin -
Working on the design and development of flight controls and autonomy software for the Future Attack Reconnaissance Aircraft programme.

IBOT robotic wheelchair
- DEKA Research & Development -
Optimized user experience in accordance to clinician feedback through embedded software debugging and improvement of overall control architecture.

Fedex Same-Day Bot
- DEKA Research & Development -
Contributed to the development of an autonomous mobile delivery robot through the programming, testing and documentation of novel control algorithms.
AI / Machine Learning
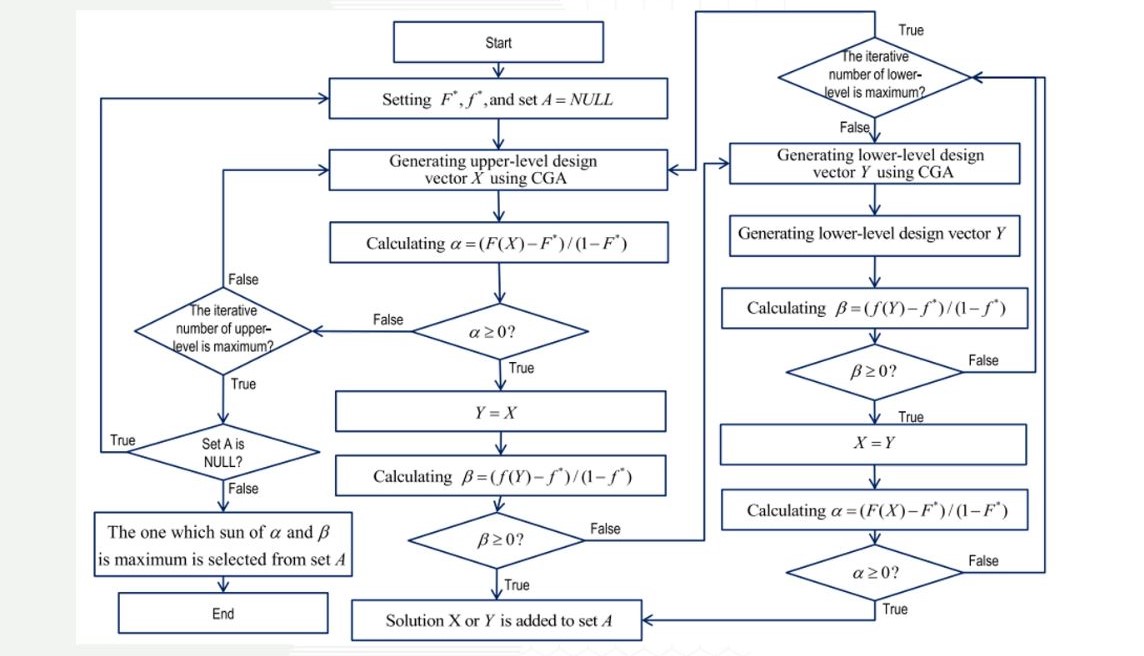
Modular Design Optimization
Matlab | Graduate Academic Project
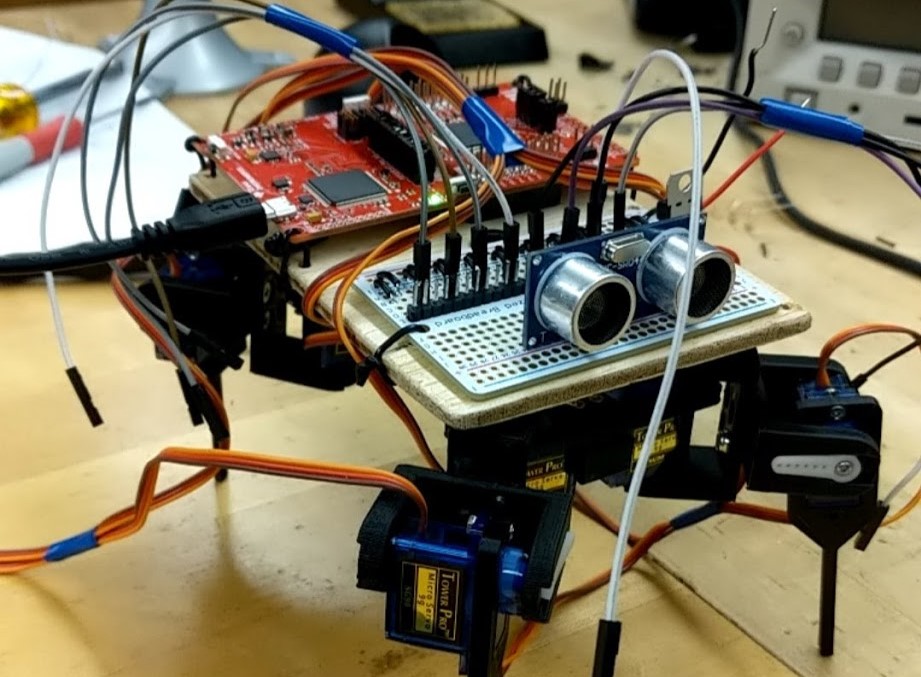
Reinforcement Learning - Walking Quadruped
Embedded C | Graduate Academic Project
Autonomous Robotics
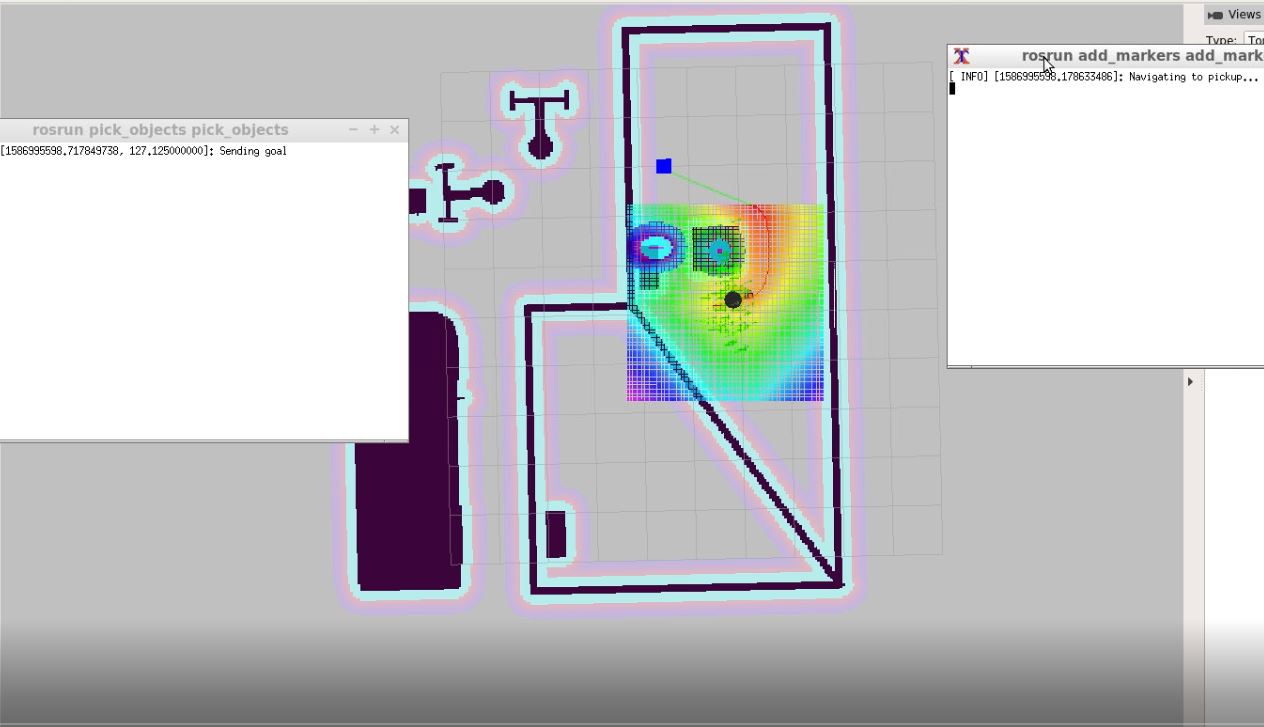
Autonomous Home Service Robot
ROS, C++ | Udacity Nanodegree Project
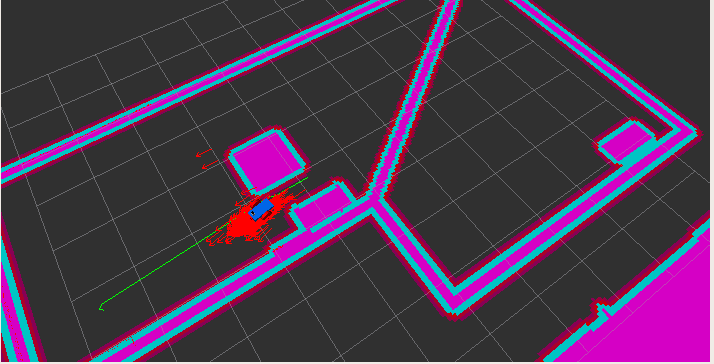
Adaptive Monte Carlo Localization of simulated robot
ROS, C++ | Udacity Nanodegree Project
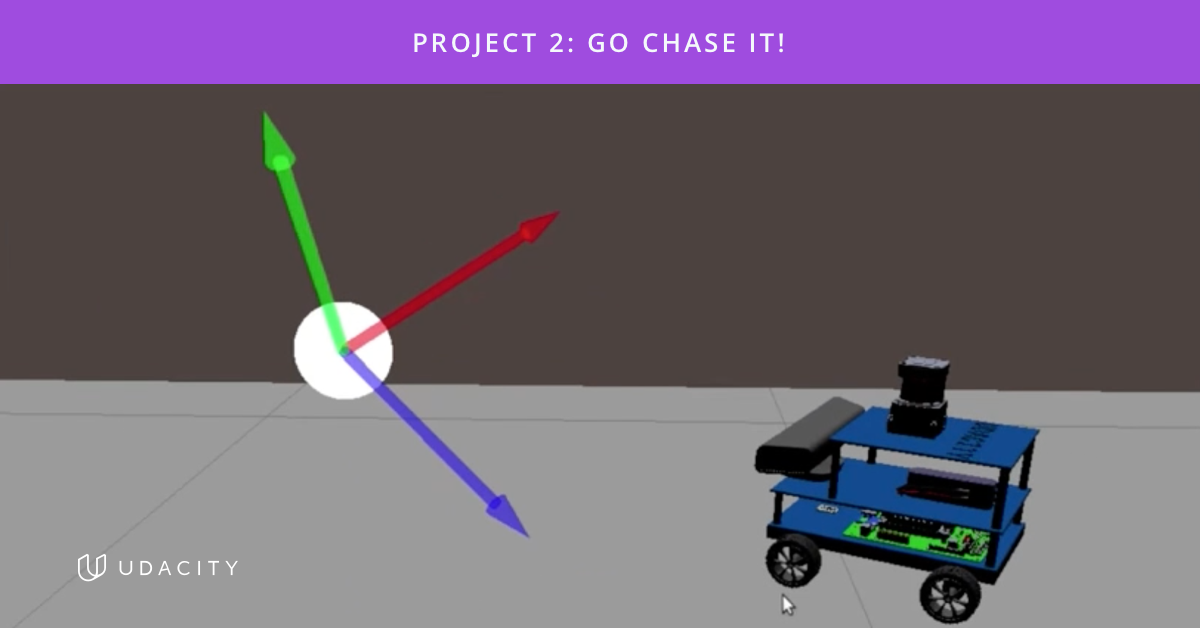
Ball chasing robot in simulation
ROS, C++ | Udacity Nanodegree Project
Embedded Control Systems
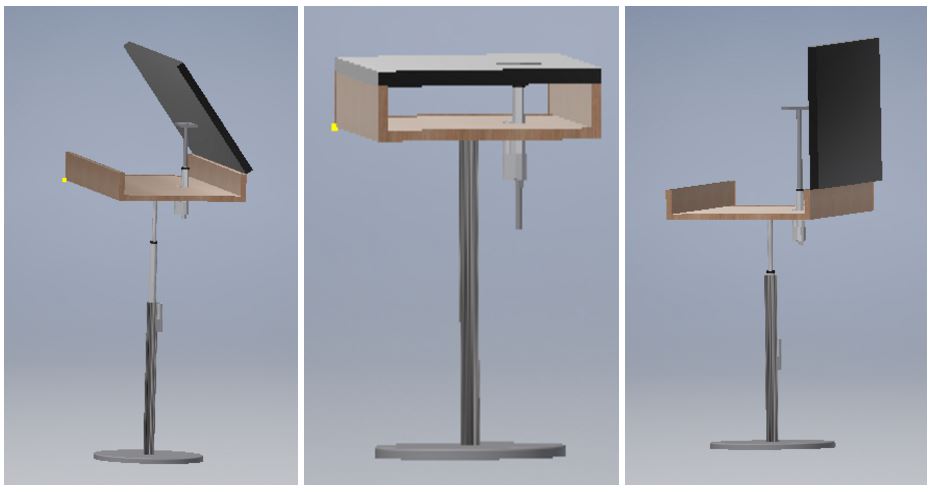
Voice Controlled Smart Desk
Embedded C | Graduate Academic Project
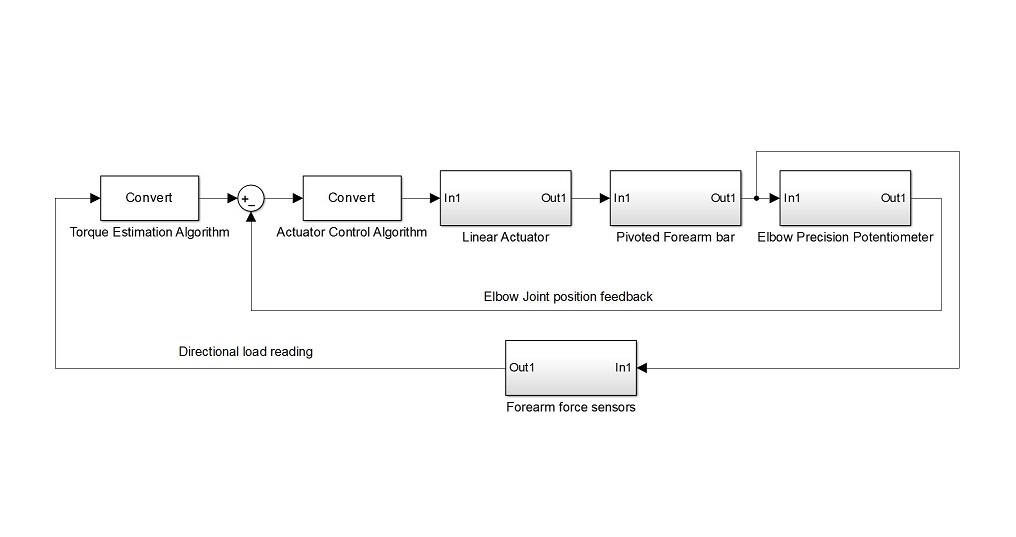
Mechatronic Arm Exoskeleton
Embedded C | Undergraduate Academic Project
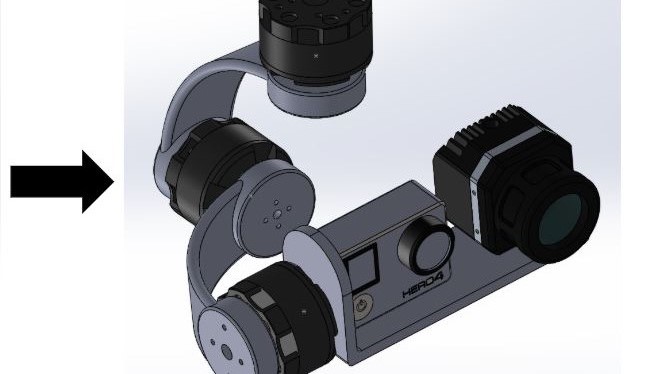
Drone-mounted Gimbal
- Alpinax Drone Services -
Developed a custom electromechanical gimbal to perfrom camera stabilization on a UAV system.